Dynamical Systems:
Source codes for simulating dynamical systems can be found below.Lorenz Attractor
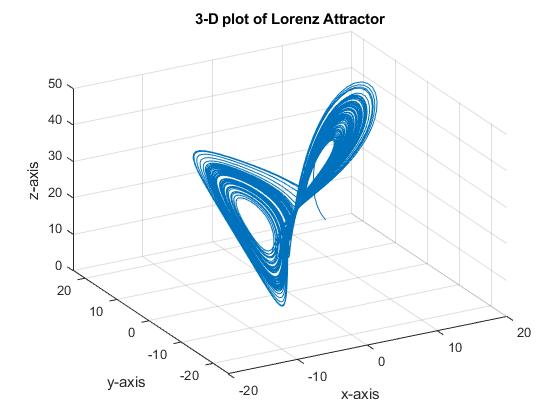
The Lorenz attractor (which is show on the top of this webpage) is a class of dynamical systems that exhibits chaotic behaviour. A small change in initial conditions can lead to large changes in the solutions. This is popularly known as "the butterfly effect".
The code given here can be run on Matlab/Octave.
A 3-D plot of the simulation is shown below.
Control:
Source codes for simulating Control techniques in dynamical systems can be found below.Two Car Vehicle Platoon using Adaptive Control
Vehicle Platoons are used in transportation for optimizing flow of traffic. Current research in autonomous driving also employ the use of vehicle platoons. There are several advanatages such as increased fuel economy, reduced traffic congestion.
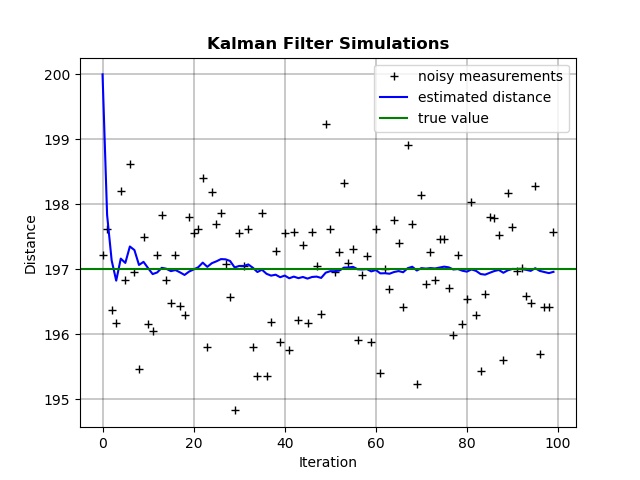
The Python code given here simulates a two car platoon. The nominal distance between the platoon is maintained through an adaptive control strategy. In addition to this, a Kalman filter is also implemented in order to reduce sensor noise.
The simulation was written for a couple of RC cars, where the velocity of the cars are given in mm/sec
and the distance between them which is measured through a noisy ultrasonic sensor is given in mm.
The Kalman filter simulation is shown below.
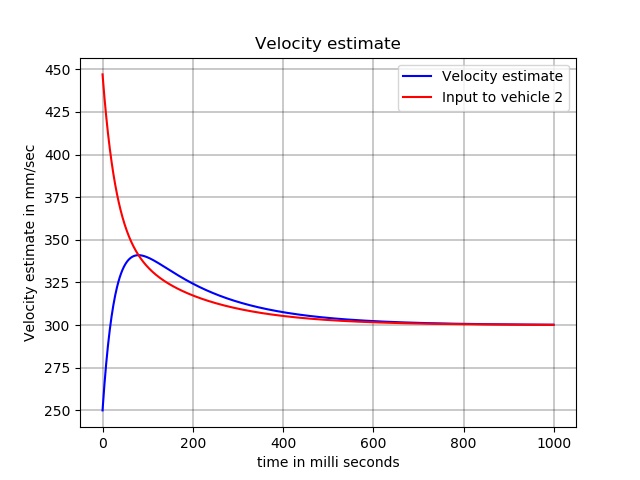
The simulation showcasing the convergence of the velocity estimate (which is the adaptive part) and the actual input
to the second car is given below.
As the estimate of the velocity converges to the actual value of the velocity of the previous car, the estimate achieves a steady state
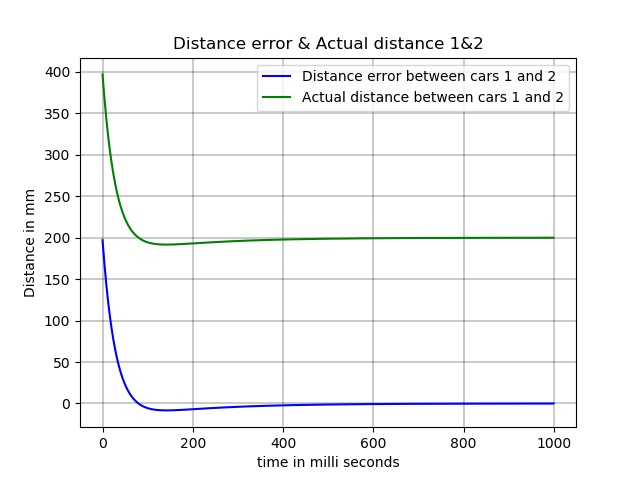
Finally, the plots showing the convergence of the distance between two cars to a constant reference of 200 mm is shown.
Abishek Chandrasekhar
Ph.D. candidate
Research: Dynamical Systems and Control Theory
Robert Bosch Centre for Cyber-Physical Systems @ IISC
+91-8197505290
Bangalore, India
Social